



















Researchers Developed the Most Realistic Robot Legs Yet
Researchers have developed what they are calling the most realistic walking robot legs yet. Not only that, but researchers were able to mimic the underlying mechanism that allows human beings to walk.
According to the researchers from the University of Arizona, “[this] robot represents a complete physical, or ‘neurobiotic,’ model of the system.”
Their robot uses a version of the message system that mimics control as well as movement, because researchers reproduced the central pattern generator (GPG), a nerve cell network concentrated in one region in the spinal cord that controls muscle movement. The CPG creates then manages signals obtained from different parts of the body, responding to stimuli in the environment – which is how people are able to walk without thinking about it.
The simplest CPG is called a half-center. The half-center is made up of two neurons that fire alternatively and receive signals from stimuli, like the foot hitting the ground. Dr. Theresa Klein and Anthony Lewis believe that a simplistic version of a CPG is what babies use to walk, which explains why babies set on a treadmill will start taking steps even before they have actually learned to walk.
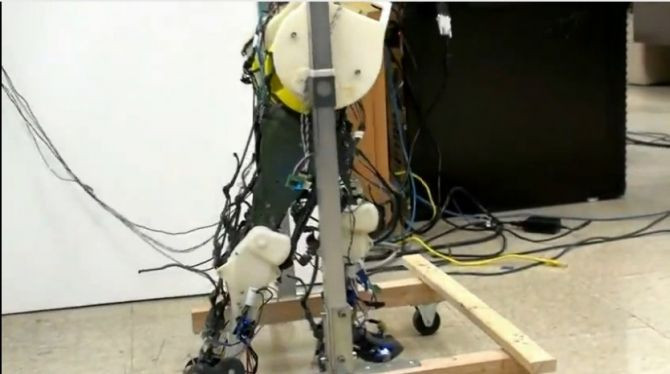
The simple half-center is what the researchers used to make their robot legs walk and helped provided stability.
The reason that the researchers used a physical representation, as opposed to computer software, is simple. “In a physical robot,” Klein and Lewis say in their paper, “the physics are necessarily accurate, while software simulations may be physically inaccurate particularly with respect to impact events, which are critical to the physics of locomotion. Thus, a physical model in a robot can be both easier to construct and more accurate.”
Researchers hope that their robot will allow them to understand how babies and animals walk. They also hope to understand how people with spinal cord injury, with the proper rehabilitation, can learn to walk again.
The researchers wrote about the development of their bipedal robot in the Journal of Neural Engineering.
Published by Medicaldaily.com







